
 产品:8
产品:8

(1)位置坐标:示教点的具体位置坐标,如直角坐标系的xyz值。
(2)示教速度:示教焊接机器从上一个示教点移到当前示教点的速度。
(3)插补方式:焊接机器人从上一个示教点移到当前示教点的动作类型,即移动轨迹,如直线、圆弧等。
(4)次序指令:包括焊接规范(焊接电流、电弧电压、焊接速度)、收弧规范(收弧电流、收弧电压、收弧时间)、焊***on、off开关、输入输出信号等。
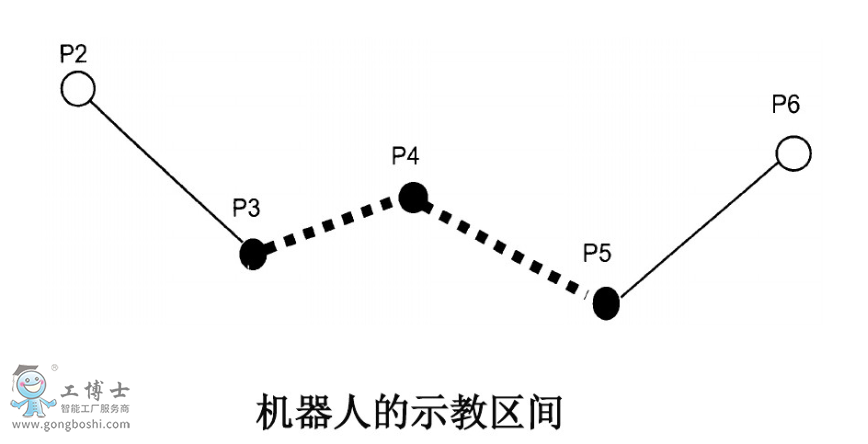
2.空走点与焊接点
(1)空走点:属于示教点的一种,是指未接的点和焊接终了点。
(2)焊接点:是指焊接开始点和焊接中间点。
3.示教操作步骤
(1)将模式开关打到TEACH上
(2)打开文件菜单
(3)单击文件菜单下的新建

(5)将机器人移到目标位置
(6)登录示教器,并进行设置,将机器人移到目标位置后按一下登陆键,则会弹出增加窗口,在增加窗口中进行相应设置。如不更改默认设置,可直接点击OK确定。
- 下一篇:OTC焊接机器人性能特点!
- 上一篇:OTC智能焊接工作站的所有组成配件!